Goal
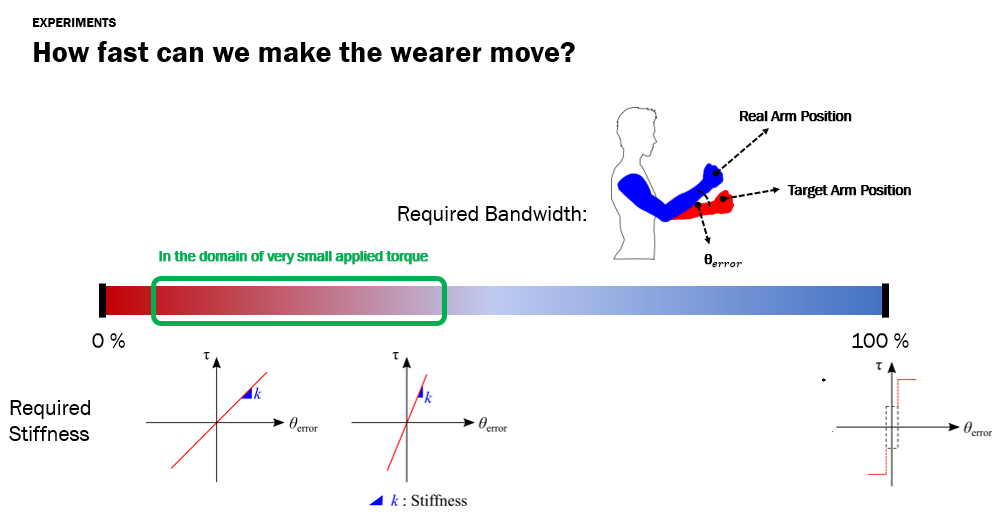
We want to answer this question, how does the bandwidth change with the amount of torque we applied? From the simple motion like in-home yoga to skate boarding, more complicated movement requires higher bandwidth. We want to answer this question in the domain of very small applied torque region because we don't want to influence the motion too much. The detailed research questions in this experiment are:
- what bandwidth of the motion can we guide somebody with small torque?
- what kind of delays are there?
This questions are meaningful in the application-wise because small torque domain is directly relevant to the actuator profile, which is cirtical for the wearable robot.