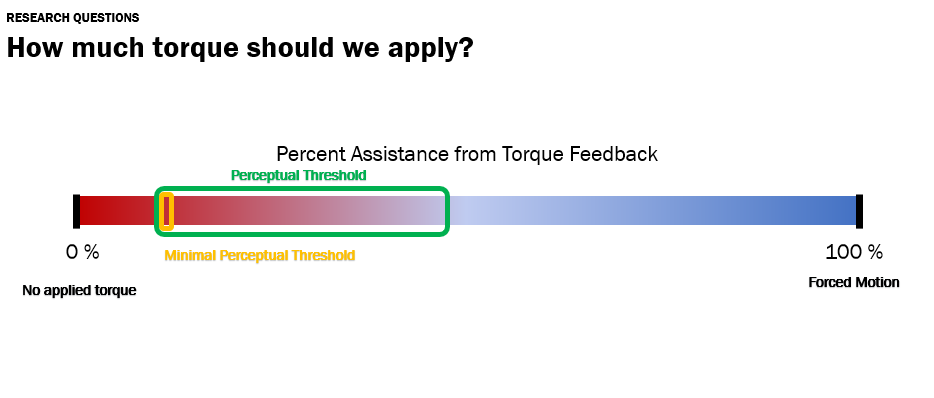
We want to know the minimum point where people can start detecting and responding to the applied torque. This torque input could maximize the information transfer regarding how much and when to move the body. The applied torque can be above this threshold during the motion training, but not too much. Or else, the robot might affect the wearer's motion. We hypothesized:
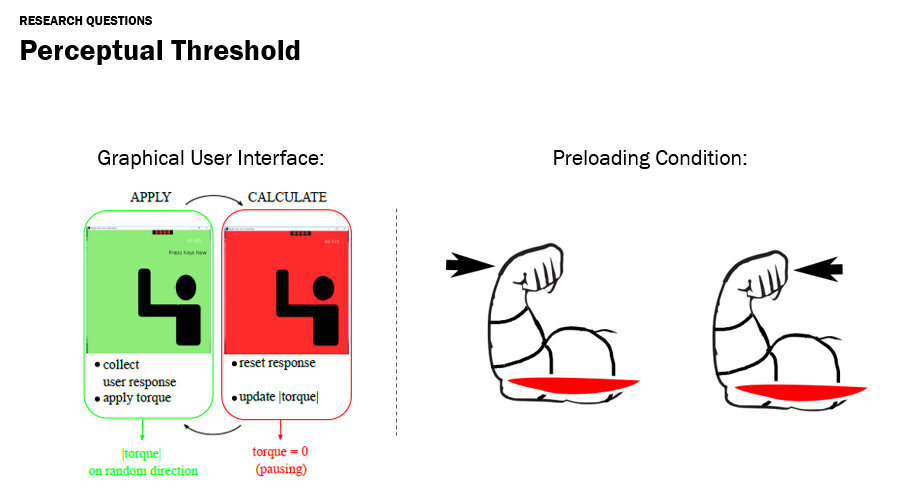
- If the arm is preloaded, as if you're holding some heavy objects, the perceptual threshold would be increased.
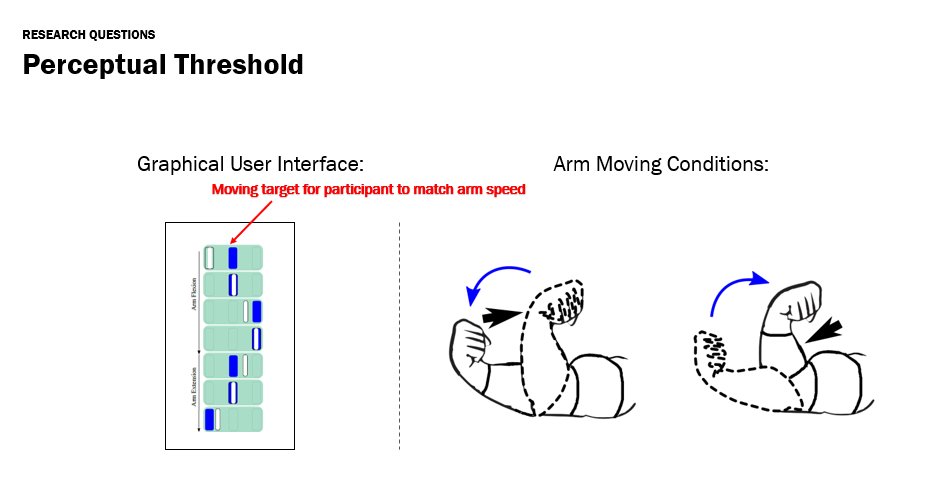
- If the arm is moving, the required torque threshold should be stronger.